首先介绍一下我们今天的主角—–PS2手柄。 PS2手柄是日本SONY公司的PlayStation2 游戏机的遥控手柄。索尼的 PSX系列游戏主机在全球都很畅销。不知什么时候便有人打起 PS2手柄的主意,破解了通讯协议,使得手柄可以接在其他器件上遥控使用,比如遥控我们熟悉的机器人。突出的特点是这款手柄性价比极高,按键丰富,方便扩展到其它应用中。
PS2通讯协议简介
PS2采用的是SPI通信协议,SPI是串行外设接口的缩写,是一种高速的、全双工、同步的通信总线,并且在芯片的管脚上只占用四根线(DI、DO、CS、CLK),节约了芯片的管脚,同时为PCB的布局上节省空间。
端口简介

PS2接收器上一共有九根引脚,按上图从左往右,依次为:
1.DI/DAT:信号流向,从手柄到主机,此信号是一个8bit 的串行数据,同步传送于时钟的下降沿。信号的读取在时钟由高到低的变化过程中完成。
2.DO/CMD:信号流向,从主机到手柄,此信号和 DI相对,信号是一个 8bit 的串行数据, 同步传送于时钟的下降沿。
3.NC:空端口。
4.GND:电源地。
5.VCC:接收器工作电源,电源范围 3~5V。
6.CS/SEL:用于提供手柄触发信号。在通讯期间,处于低电平。
7.CLK:时钟信号,由主机发出,用于保持数据同步。
8.NC:空端口。
9.ACK:从手柄到主机的应答信号。此信号在每个8bits数据发送的最后一个周期变低并且CS一直保持低电平,如果CS信号不变低,约60微秒PS主机会试另一个外设。在编程时未使用ACK端口。(可以忽略)

- CS线在通讯期间拉低,通信过程中CS信号线在一串数据(9个字节,每个字节为8位)发送完毕后才会拉高,而不是每个字节发送完拉高。
- DO、DI在在CLK时钟的下降沿完成数据的发送和读取。
下降沿:数字电平从高电平(数字“1”)变为低电平(数字“0”)的那一瞬间叫作下降沿。
- CLK的每个周期为12us。若在某个时刻,CLK处于下降沿,若此时DO为高电平则取“1”,低电平则取“0”。连续读8次则得到一个字节byte的数据,连续读9个字节就能得到一次传输周期所需要的数据。DI也是一样的,发送和传输同时进行。
具体的通讯过程如下:
以STM32为例:
- 首先STM32拉低CS片选信号线,然后在每个CLK的下降沿读一个bit,每读八个bit(即一个byte)CLK拉高一小段时间,一共读九组bit。
- 第一个byte是STM32发给接收器命令“0X01” 。
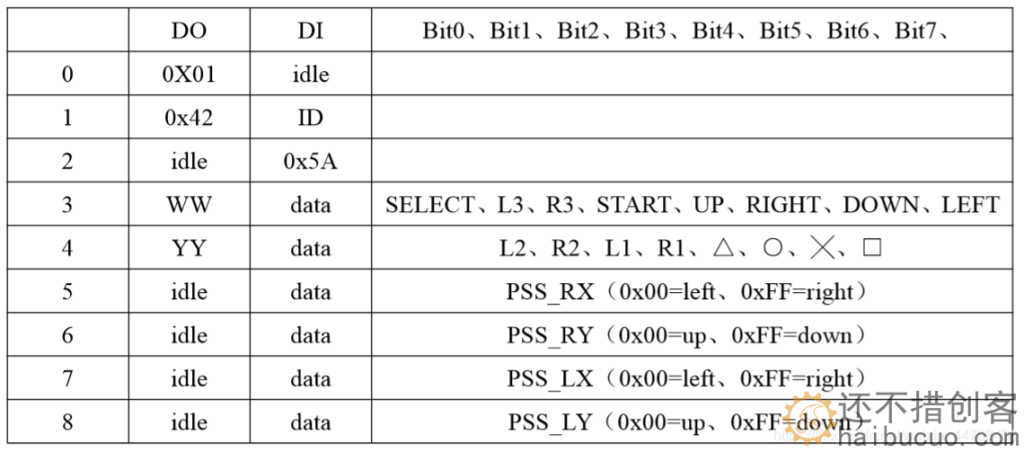
- PS2手柄会在第二个byte回复它的ID(0x41=绿灯模式,0x73=红灯模式),同时第二个byte时STM32发给PS2一个0x42请求数据。
红灯模式时 : 左右摇杆发送模拟值,0x00~0xFF 之间,且摇杆按下的 键值 L3 、 R3 有效;
绿灯模式时 : 左右摇杆模拟值为无效,推到极限时,对应发送 UP、RIGHT、DOWN、 LEFT、△、○、╳、□,按键 L3 、 R3 无效;
- 第三个byte PS2 会给主机发送 “0x5A” 告诉STM32数据来了。
- 从第四个byte开始全是接收器给主机发送数据,每个byte定义如上图,当有按键按下,对应位为“0 ”,例如当键“SELECT”被按下时, Data[3]=11111110。
对于整个通讯过程,你理解成下面的一段对话:
对于整个通讯过程,你理解成下面的一段对话:
首先,拉低CS,表示开始数据通信
byte 0 :
STM32(DO) : 0x01 ————————- [现在开始通信]
PS2手柄(DI) : 空 —————————- [空]
byte 1 :
STM32(DO) : 0x42 ————————– [请求发送数据]
PS2手柄(DI) : 红灯0x73
绿灯0X41 ———————[现在的ID]
byte 2 :
STM32(DO) : 空 —————————— [空]
PS2手柄(DI) : 0X5A ————————- [数据来了]
byte 3 :
STM32(DO) : 0X00~0XFF —————— [右侧小震动电机是否开启]
PS2手柄(DI) : 00000000~11111111 ——- [SELECT、 L3 、 R3、 START 、 UP、 RIGHT、 DOWN、 LEFT 是否被按下,若被按下对应位为0]
byte 4 :
STM32(DO) : 0X00~0XFF —————— [左侧大震动电机振动幅度]
PS2手柄(DI) : 00000000~11111111 ——- [L2 、 R2、L1 、R1、△、○、╳、□ 是否被按下,若被按下对应位为0]
byte 5 :
STM32(DO) : 空 ——————————– [空]
PS2手柄(DI) : 0X00~0XFF —————— [左侧X轴摇杆模拟量]
byte 6 :
STM32(DO) : 空 ——————————– [空]
PS2手柄(DI) : 0X00~0XFF —————— [左侧Y轴摇杆模拟量]
byte 7 :
STM32(DO) : 空 ——————————– [空]
PS2手柄(DI) : 0X00~0XFF —————— [右侧X轴摇杆模拟量]
byte 8 :
STM32(DO) : 空 ——————————– [空]
PS2手柄(DI) : 0X00~0XFF —————— [右侧Y轴摇杆模拟量]
注:在手柄通信前还需要一系列的初始化(是否启动振动电机、是否进行锁存等),详情可以参考下面代码。当然,不进行初始化也是可以的,手柄会默认之前的配置。
注意:
1.模拟量只对红灯模式下有效,绿灯模式下摇杆推至极限分别对应 UP、RIGHT、DOWN、 LEFT、△、○、╳、□ 。
2. L3、R3只对红灯模式下有效,在绿灯模式下无效。
基于STM32的PS2通信源码
//采用模拟SPI通信
/*DI->PB12;
DO->PB13;
CS->PB14;
CLK->PB15
*/
void PS2_Init(void) {
// 输入 DI->PB12
RCC->APB2ENR|=1<<3; // 使能 PORTB 时钟
GPIOB->CRH&=0XFFF0FFFF;//PB12 设置成输入 默认下拉
GPIOB->CRH|=0X00080000;
// DO->PB13 CS->PB14 CLK->PB15
RCC->APB2ENR|=1<<3; // 使能 PORTB 时钟
GPIOB->CRH&=0X000FFFFF;
GPIOB->CRH|=0X33300000; //PB13、 PB14 、 PB15 推挽输出
}
//端口初始化,PB12 为输入,PB13 、PB14 、PB15 为输出。
// 向手柄发送命令
void PS2_Cmd(u8CMD)
{
volatile u16 ref=0x01;
Data[1]=0;
for(ref=0x01;ref<0x0100;ref<<=1)
{
if(ref&CMD)
{
DO_H; // 输出一位控制位
}
else DO_L;
CLK_H; // 时钟拉高
delay_us(10);
CLK_L;
delay_us(10);
CLK_H;
if(DI)
{Data[1]=ref|Data[1];}
}
delay_us(16);
}
// 判断是否为红灯模式,0x41=模拟绿灯,0x73=模拟红灯
// 返回值;0,红灯模式
// 其他,其他模式
u8PS2_RedLight(void)
{
CS_L;
PS2_Cmd(Comd[0]); // 开始命令
PS2_Cmd(Comd[1]); // 请求数据
CS_H;
if( Data[1]== 0X73) return 0;
else return 1;
}
// 读取手柄数据
void PS2_ReadData(void)
{
volatile u8 byte=0;
volatile u16 ref=0x01;
CS_L;
PS2_Cmd(Comd[0]); // 开始命令
PS2_Cmd(Comd[1]); // 请求数据
for(byte=2;byte<9;byte++) // 开始接受数据
{
for(ref=0x01;ref<0x100;ref<<=1)
{
CLK_H;
delay_us(10);
CLK_L;
delay_us(10);
CLK_H;
if(DI)
{Data[byte]= ref|Data[byte];}
}
delay_us(16);
}
CS_H;
}
/*
上面两个函数分别为主机向手柄发送数据、手柄向主机发送数据。手柄向主机发送的数据缓存在数组 Data[]中,
数组中共有9个元素,每个元素的意义请见表1。
还有一个函数是用来判断手柄的发送模式,也就是判断 ID(红灯还是绿灯模式) 即 Data[1]的值。
*/
// 对读出来的 PS2 的数据进行处理,只处理按键部分
//按下为0,未按下为1
u8PS2_DataKey()
{
u8 index;
PS2_ClearData();
PS2_ReadData();
Handkey=(Data[4]<<8)|Data[3]; // 这是 16个按键 按下为 0 , 未按下为 1
for(index=0;index<16;index++)
{
if((Handkey&(1<<(MASK[index]-1)))==0)
returnindex+1;
}
return 0; // 没有任何按键按下
}
// 得到一个摇杆的模拟量 范围 0~256
u8PS2_AnologData(u8 button)
{
return Data[button];
}
// 清除数据缓冲区
void PS2_ClearData()
{
u8 a;
for(a=0;a<9;a++)
{Data[a]=0x00;}
}
/*
8 位数 Data[3]与 Data[4],分别对应着 16个按键的状态,按下为 0,未按下为 1。
通过 对这两个数的处理,得到按键状态并返回键值。
另一个函数的功能就是返回模拟值,只有在“红灯模式”下值才是有效的,拨动摇杆, 值才会变化,这些值分别存储在 Data[5]、Data[6]、
Data[7]、 Data[8]。
*/
//手柄配置初始化:
void PS2_ShortPoll(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x42);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS_H;
delay_us(16);
}
//进入配置
void PS2_EnterConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x01);
PS2_Cmd(0x00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
// 发送模式设置
void PS2_TurnOnAnalogMode(void)
{
CS_L;
PS2_Cmd(0x01);
PS2_Cmd(0x44);
PS2_Cmd(0X00);
PS2_Cmd(0x01);//analog=0x01;digital=0x00 软件设置发送模式
PS2_Cmd(0xEE);//Ox03 锁存设置,即不可通过按键“MODE ”设置模式。 //0xEE 不锁存软件设置,可通过按键“MODE ”设置模式。
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
// 振动设置
void PS2_VibrationMode(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x4D);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0X01);
CS_H;
delay_us(16);
}
// 完成并保存配置
void PS2_ExitConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
CS_H;
delay_us(16);
}
// 手柄配置初始化
void PS2_SetInit(void)
{
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfing(); // 进入配置模式
PS2_TurnOnAnalogMode(); // “红绿灯”配置模式,并选择是否保存
PS2_VibrationMode(); // 开启震动模式
PS2_ExitConfing(); // 完成并保存配置
}
/*
可以看出配置函数就是发送命令,发送这些命令后,手柄就会明白自己要做什么了,发送命令时,不需要考虑手柄发来的信息。
手柄配置初始化,PS2_ShortPoll()被执行了3次,主要是为了建立和恢复连接。
具体的配置方式请看注释。
*/
void PS2_Vibration(u8motor1,u8motor2)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01); // 开始命令
PS2_Cmd(0x42);// 请求数据
PS2_Cmd(0X00);
PS2_Cmd(motor1);
PS2_Cmd(motor2);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//只 有 在 初 始 化 函 数 void PS2_SetInit(void) 中 , 对 震 动 电 机 进 行 了初 始 化 (PS2_VibrationMode();//开启震动模式),这个函数命令才会被执行。
参考:https://blog.csdn.net/weixin_44793491/article/details/105781595
请登录之后再进行评论